Flexible and intelligent production for small batches
The demonstrators developed within the framework of the Robotics Lab represent an open platform for discussions and for jointly shaping the production systems of the future. The demonstrators also serve to evaluate and validate research results and disseminate them to a wide audience ranging from industry partners and academic institutes, to interested students. The activities focus on a knowledge-based systems engineering approach for robotics-supported cyber-physical production systems (CPPS), particularly research into ontology-based concepts for the semantic interoperability of production resources and knowledge-based autonomous production.
Using real application scenarios, the lab illustrates how the developed methods can satisfy the requirements of small-to-medium enterprise manufacturers (SMEs). This includes the required efficiency improvements during the design, configuration and operational phases in order to cost-effectively implement customer-specific small-batch production as well.
The Robotics Lab demonstrates how synergy effects can be generated and exploited by means of semantic integration and the interpretation of heterogeneous information and data sources. This leads to a deeper understanding of the production goal and its implications, which represent the foundation for autonomous production.
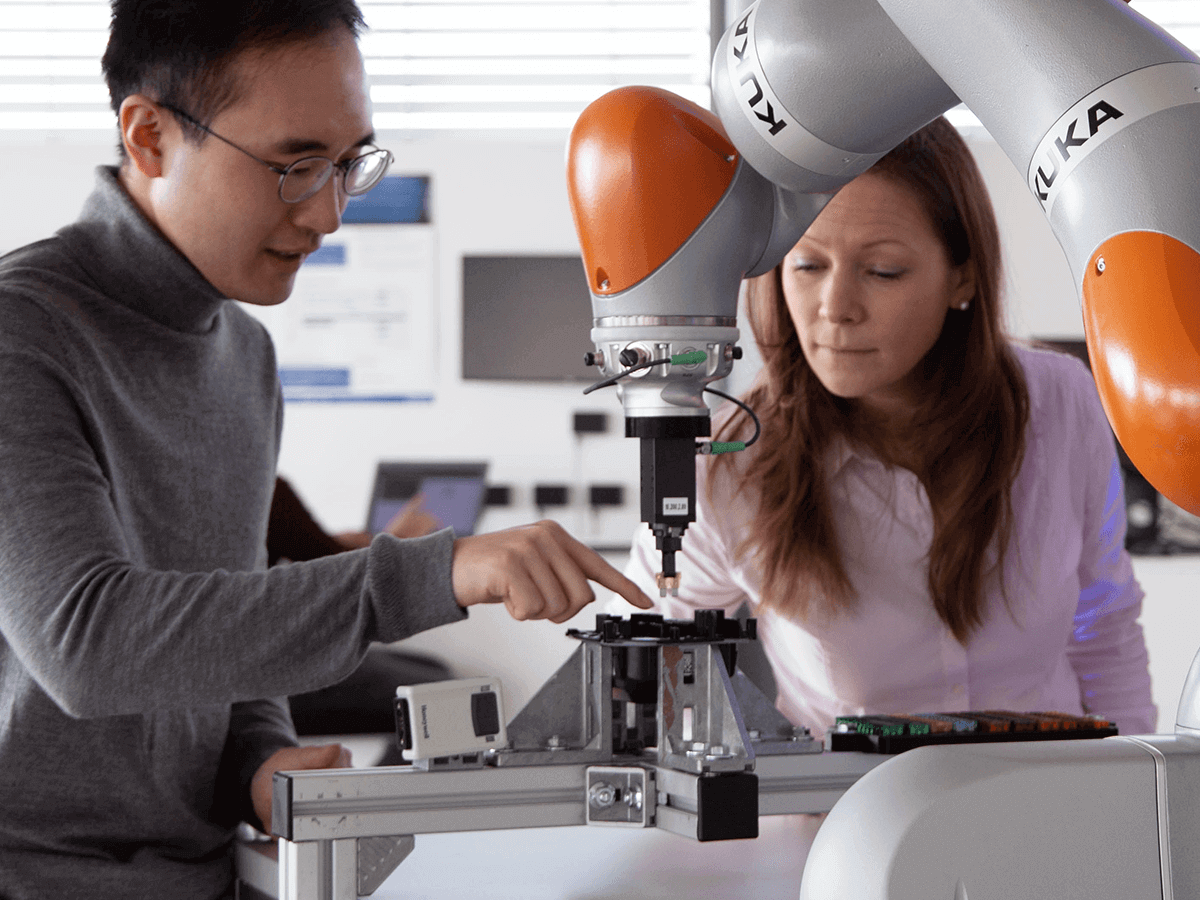
The SMEcobot demonstrator showcases a knowledge- and model-based approach to robot-assisted automation of the future. Semantic models of products, processes, and production resources are used for this purpose. The aim is to systematically link relevant knowledge to the respective automation task in order to effectively and efficiently support product development as well as the instruction and operation of automation systems.
The demonstrator includes the following functions, among others: