



Efficiently developing safe autonomous systems with MBSE and test automation
Mobility Lab
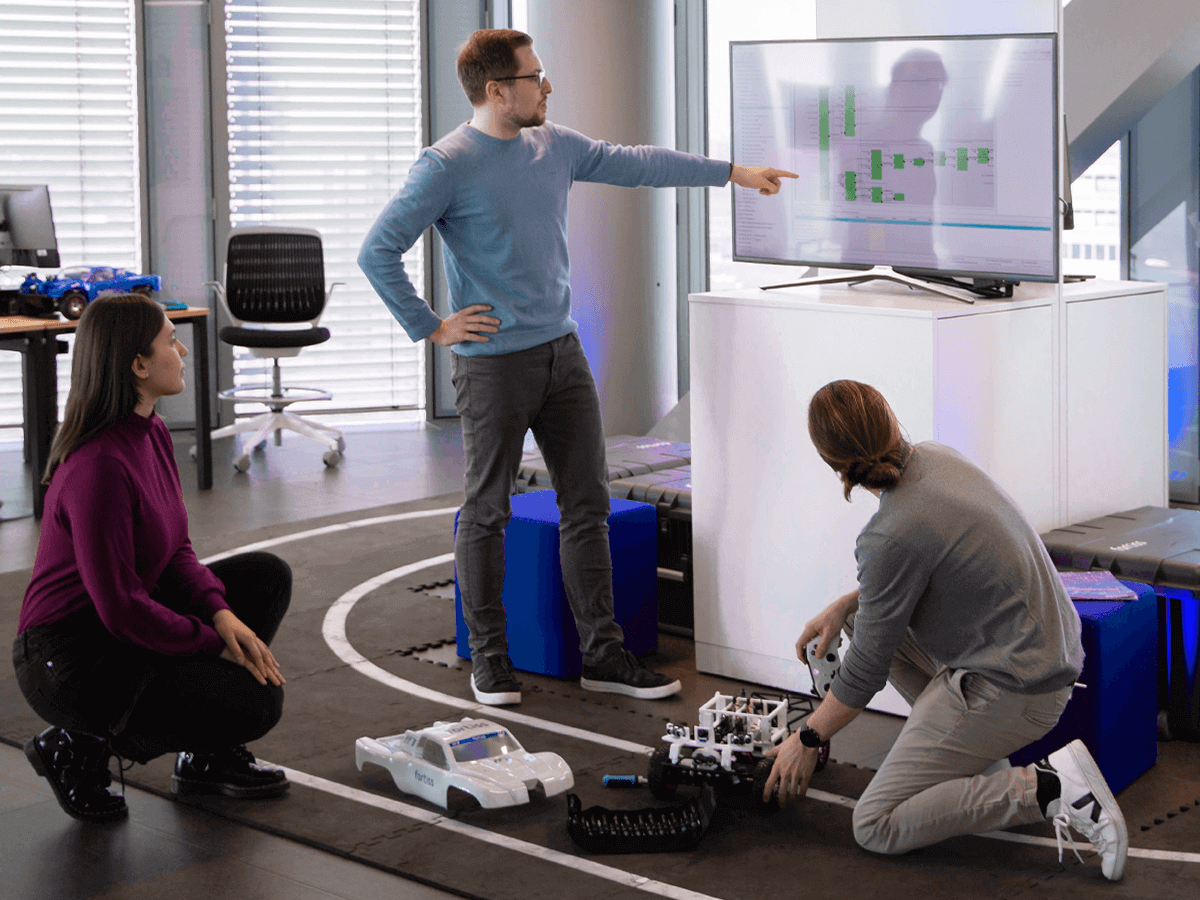
The Mobility Lab provides hands-on access to fortiss research, methods, and open-source tools for model-based systems engineering and automated software testing by illustrating their application in the design, implementation, and verification of autonomous driving (AD) and driver assistance (ADAS) functions. The setup includes a test track with sensor- and compute-equipped small-scale vehicles, along with simulators for vehicle functions as well as dynamics and the driving environment.
The Mobility Lab hosts demonstrators that illustrates how fortiss solutions support OEMs, suppliers, and tool-vendors in the cyber-physical systems supply chain — such as the automotive sector — in developing complex systems more efficiently and cost-effectively. As an open platform, the lab provides access to assets like open-source tools, models, and use-case source code to facilitate research and transfer to industry and academia. It also serves as a hub for academic and professional training, as well as student projects.
Focus
Model-based Systems Engineering
The Mobility Lab provides a platform for demonstrators that integrate structured engineering models with formal methods, simulation, and AI. Based on fortiss’ open-source MBSE tool AutoFOCUS3 and using models of advanced driver-assistance systems (ADAS) functions, the lab supports research on automating engineering tasks and shifting them to earlier stages of development, including:
- System architectures analysis and optimization
- Early assessment of safety mechanisms through simulation-based fault-injection testing
- Structured reuse of modeling artefacts and product-line engineering
- Analysis and management of model quality and consistency
Advanced Test Automation
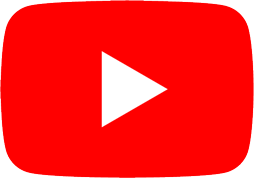
The Mobility lab provides a flexible and modular environment for the development, integration, and testing of advanced driver assistance systems (ADAS) and automated driving (AD) functions on small-scale physical vehicles. It supports diverse test configurations, including pure simulation, real-world deployment, vehicle-in-the-loop (ViL), and mixed-reality (MR) setups. Built on fortiss' open-source toolchain and research frameworks, the lab enables a range of research activities, including:
- Testing AD/ADAS systems under diverse operational scenarios
- Validation of safety mechanisms using hybrid reality testing
- Automated detection of inconsistencies in behavioral and perception models
- Reality gap analysis and mitigation via mixed reality (MR) and vehicle-in-the-loop (ViL) setups
Services
- Information
The Mobility Lab enables companies to learn about all development phases of cyber-physical systems based on a realistic, complex and easy-to-understand use case from the field of assisted/autonomous driving. - Customized solutions
The Mobility Lab represents an integrated and project-specific adaptable test bed for joint research projects on model-based engineering and test automation as well as a platform for customized training offers. - Network
The Mobility Lab offers a unique platform for the collaboration of industry and science. Its demonstrations and the showcased open-source solutions provide a starting point for collaborations, also beyond the domain of mobility. - Qualification
Training offers for industrial users show insights into solutions to address the challenges in engineering complex, software-defined systems such as autonomous vehicles. - Research
The Mobility Lab provides a consistent and adaptable open-source platform for research projects in the field of model-based engineering and advanced test automation, leveraging state-of-the art technologies such as formal methods, (co-)simulation, and AI as well as industrial standards such as FMI. - Prototypes
The AutoFOCUS3 MBSE tool, the OpenSBT search-based testing framework and the AD/ADAS use cases are available under permissive open-source licenses for use as testbeds or starting points for innovative tooling solutions.
Fields of competence

Efficient automated testing of complex and autonomous systems
Making complex systems safe and manageable through modelling
Projects

Efficient model-based system architectures for fail-safe autonomous driving functions

Integrated development environment for the aerospace industry

Platform for continuous analysis of model quality in systems engineering

Test case generation for robust safety-critical systems
Software
Model-based development of embedded systems

Search-based testing of automated driving systems
Contact


More information
- SPEDiT Training material for model-based development
- Bachelor’s/master’s practical course in the field of competence Model-based Systems Engineering
- Model-based Systems Engineering: basics and potentials Workshop
- fortissimo demonstrator vehicle