Sichere autonome Systeme effizient entwickeln mit MBSE und Testautomatisierung
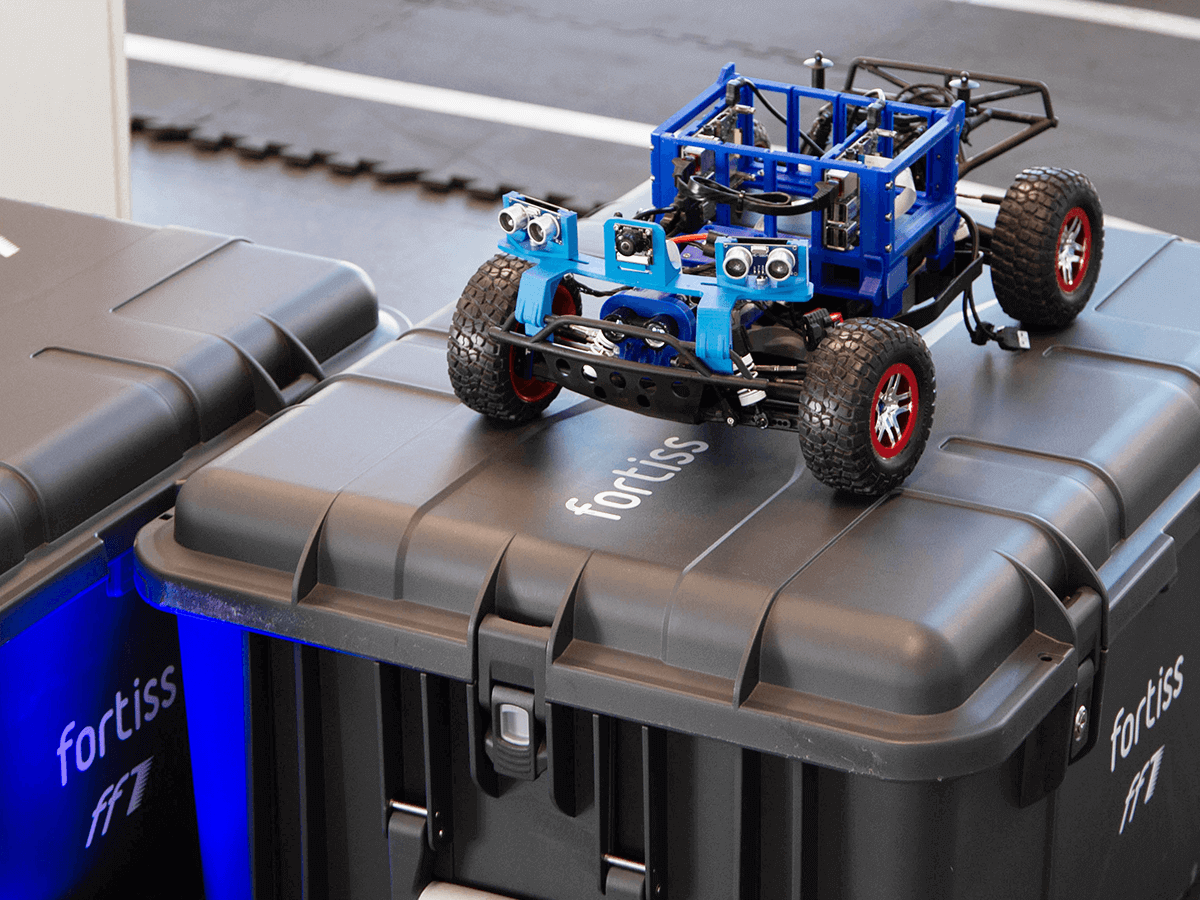
Das Mobility Lab bietet praxisnahen Zugang zur Forschung von fortiss sowie zu Methoden und Open-Source-Werkzeugen für modellbasiertes Systems Engineering und automatisiertes Softwaretesten. Anhand konkreter Anwendungen in Entwurf, Implementierung und Verifikation von Funktionen für autonomes Fahren (AD) und Fahrerassistenzsysteme (ADAS) wird deren Nutzen anschaulich demonstriert. Die Laborausstattung umfasst eine Teststrecke mit sensor- und rechenfähigen Fahrzeugmodellen im Kleinmaßstab sowie Simulatoren für Fahrzeugfunktionen, -dynamik und die Fahrumgebung.
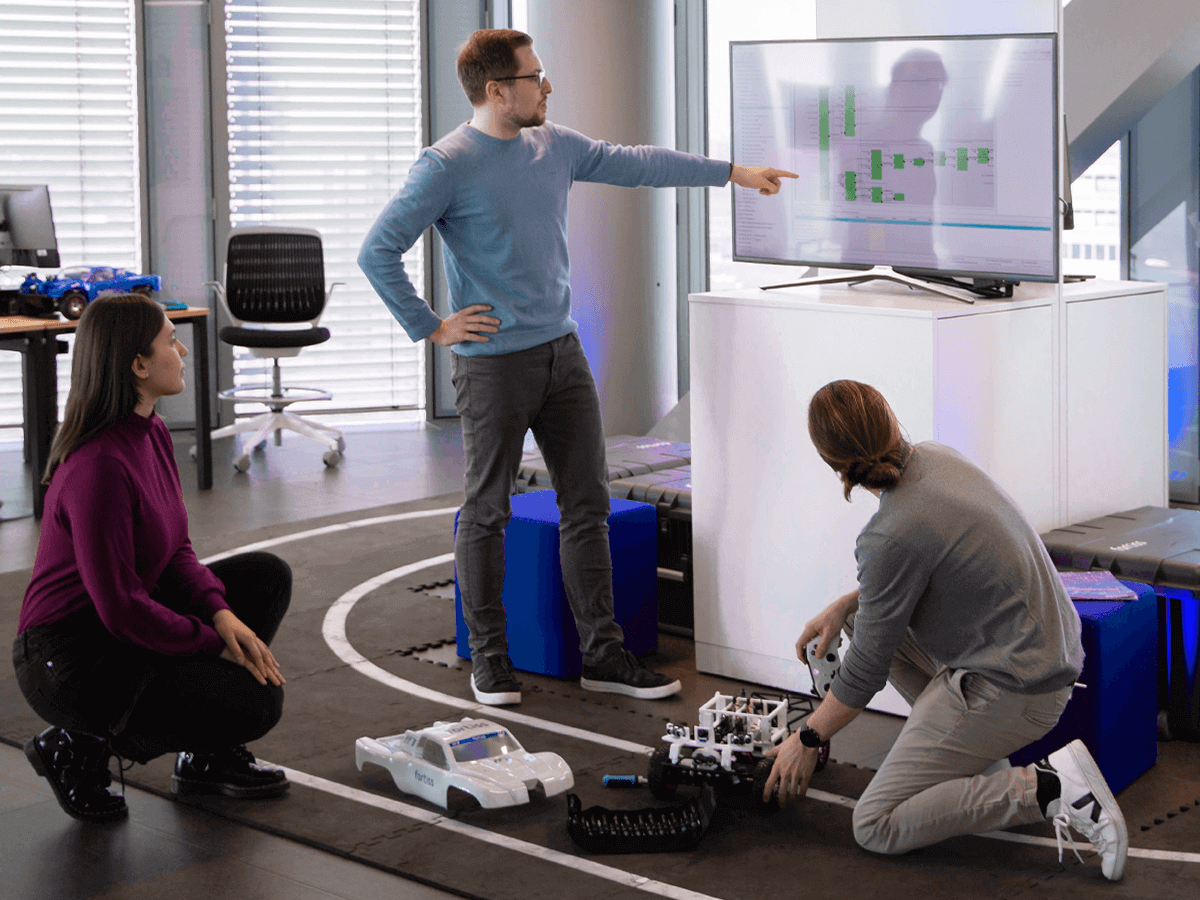
Das Mobility Lab präsentiert Demonstratoren, die zeigen, wie fortiss-Lösungen OEMs, Zulieferer und Tool-Hersteller in der Wertschöpfungskette cyber-physikalischer Systeme – etwa im Automobilbereich – bei der effizienteren und kostengünstigeren Entwicklung komplexer Systeme unterstützen. Als offene Plattform stellt das Lab Assets wie Open-Source-Werkzeuge, Modelle und Quellcode zu Use-Cases bereit, um Forschung sowie den Transfer in Industrie und Wissenschaft zu fördern. Zudem dient es als Anlaufstelle für akademische und berufliche Weiterbildung sowie für studentische Projekte.
Modellbasiertes Systems Engineering
Das Mobility Lab dient als Plattform für Demonstratoren, die strukturierte Entwicklungsmodelle mit formalen Methoden, Simulation und KI integrieren. Basierend auf dem Open-Source-MBSE-Werkzeug AutoFOCUS3 von fortiss und mithilfe von Modellen fortschrittlicher Fahrerassistenzfunktionen (ADAS) unterstützt das Lab die Forschung zur Automatisierung von Entwicklungsaufgaben und deren Verlagerung in frühe Entwicklungsphasen, darunter:
Fortschrittliche Testautomatisierung
Das Mobility Lab bietet eine flexible, modulare Umgebung für die Entwicklung, Integration und das Testen von ADAS- und automatisierten Fahrfunktionen (AD) mit physikalischen Fahrzeugmodellen im Kleinmaßstab. Es unterstützt verschiedene Testkonfigurationen – von reinen Simulationen über reale Fahrversuche bis hin zu Vehicle-in-the-Loop (ViL)- und Mixed-Reality (MR)-Szenarien. Auf der Open-Source-Toolchain und den Forschungsrahmenwerken von fortiss aufbauend, ermöglicht das Lab eine Vielzahl von Forschungsthemen, darunter:
Wenn Sie dieses Video aktivieren, werden Daten automatisiert an YouTube übertragen.