



Bridge the gap between neuroscience computing and robotics
Human Brain Project
Project description
A pan-EU team led by fortiss till March 2020, is developing the platform, which involves simulation software that enables robotics engineers, neuroscientists and AI enthusiasts to control virtual 3D robots with a wide range of different neural networks.
Controlling neural networks (spiking or conventional methods) is an important trend. The issue is that to date, no simulator has been capable of carrying this out. The strength of the NRP lies in the seamless integration of physics and neural simulation. The simulators developed by the NRP team are embedded in a graphics tool, allowing users to create embodied AI experiments within a closed loop.
The platform is available online or can be installed on a computer. It utilizes Gazebo as an underlying robot simulator and supports Nest, Spinnaker, Pynn, Nengo or Tensorflow as neural network simulators.
Research contribution
The fields of robotics and neuroscience are increasingly converging. In the complex worlds of robotics and AI technology, simulation is a must-have, especially when cognitive enhancements to robots are involved.
On one hand, neuroscientists and AI experts can use the NRP to test their neural networks in a virtual environment using sensor data and actuator controls. On the other, robot specialists can utilize neural controllers to try out innovative robot controls, compare with competitors, test with neuromorphic hardware (Intel Loihi or Spinnaker) and ultimately make solid design decisions.
With this in mind, we are researching how the processing capacity of the neurosimulator can be massively distributed across Europe’s major research centers, plus we are interested in the design of neuromorphic hardware. Our scientists are also working on ways to improve the physics simulation through particle physics, which will hopefully help to simulate liquids and sandy materials in real-time.
The NRP meanwhile offers muscle simulations, skeletal structure models and tools for the realistic simulation of biologically-inspired systems. And the in silico testing of spinal cord controllers for walking or swimming is now possible using biologically-inspired robots.
Because of its unique functionality and complexity, the NRP is used within and outside of the Human Brain Project for university courses, neurorobotics research projects and the neurosciences.
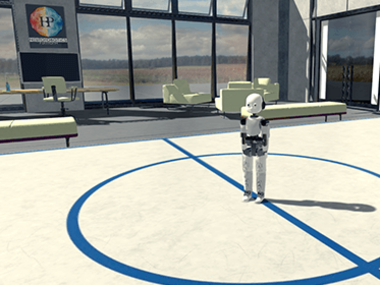
3D simulator for neural network controlled robots
Funding
The EU-funded Human Brain Project, launched in 2013, is segmented into 12 subprojects, of which the NRP is one.
The project consortium comprises 110 international research facilities, as well as partners from industry. The budget amounts to around 1 billion euros, with funding set to expire in 2023.
Human Brain Project, EU Framework FP7-604102 (THE HUMAN BRAIN PROJECT) and EU grant agreement no. 945539 (HBP SGA3)
Project duration
01.02.2014 - 31.09.2023
Contact

More information
- Project website Human Brain Project
- Project website HBP Neurorobotics Platform
- Youtube channel HBP Neurorobotics
- Neurorobotics Platform Open source 3D simulator for neural network controlled robots
Project partner
Publications
- Neurorobotic reinforcement learning for domains with parametrical uncertainty Frontiers in Neurorobotics, 17():, 2023. Details URL DOI BIB
- A Spiking Central Pattern Generator for the control of a simulated lamprey robot running on SpiNNaker and Loihi neuromorphic boards Neuromorphic Computing and Engineering, 1(1):, 2021. Details URL DOI BIB
- Experimental and Computational Study on Motor Control and Recovery After Stroke: Toward a Constructive Loop Between Experimental and Virtual Embodied Neuroscience Frontiers in Systems Neuroscience, 14():, 2020. Details URL DOI BIB
- The Neurorobotics Platform for Teaching – Embodiment Experiments with Spiking Neural Networks and Virtual Robots In 2019 IEEE International Conference on Cyborg and Bionic Systems (CBS), 2019. IEEE. Details URL DOI BIB
- A Biomimetic Control Method Increases the Adaptability of a Humanoid Robot Acting in a Dynamic Environment Frontiers in Neurorobotics, 13():, 2019. Details URL PDF DOI BIB
- Running Large-Scale Simulations on the Neurorobotics Platform to Understand Vision – The Case of Visual Crowding Frontiers in Neurorobotics, 13():, 2019. Details URL PDF DOI BIB
- Body Randomization Reduces the Sim-to-Real Gap for Compliant Quadruped Locomotion Frontiers in Neurorobotics, 13():, 2019. Details URL PDF DOI BIB
- The Collaborative Virtual Reality Neurorobotics Lab In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces (VR), pages 1671–1674, Osaka, Japan, 2019. IEEE. Details URL PDF DOI BIB
- Roboter mit Hirn blog, 2018. Details URL BIB
- Connecting Artificial Brains to Robots in a Comprehensive Simulation Framework: The Neurorobotics Platform Frontiers in Neurorobotics, 11():, 2017. Details URL PDF DOI BIB
- A visual tracking model implemented on the iCub robot as a use case for a novel neurorobotic toolkit integrating brain and physics simulation In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), pages 1179–1184, Seoul, South Korea, 2015. Details URL PDF DOI BIB